AUTOWEEDER
This project started with the question of how food production will look like in the future. I discovered that food production needs to increase by 70% until 2050 to feed the growing world population. It will be a challenge to keep food production sustainable, environmentally friendly, nutritious, and cost-effective. My goal with this project was to facilitate the organic small-scale urban farmers and growers of the future, who want to grow food in a sustainable way but not always have the time.
By researching the area and talking to people with experience in growing their own food, I found a need for making the work more time-efficient. I decided to focus on the most burdensome of tasks, which is weed control. Automation is currently changing the face of agriculture. Therefore, I decided to explore the opportunity of automation within my chosen area.
This resulted in Autoweeder, which is an autonomous weeding robot. It navigates through your vegetable garden, allotment, or small field by GPS and cultivates the paths between the rows of crops. The stirrup blade stirs the surface soil in order to cut off the weeds and prevent the appearance of new ones. This results in increased soil health and a better opportunity for the crops to grow.
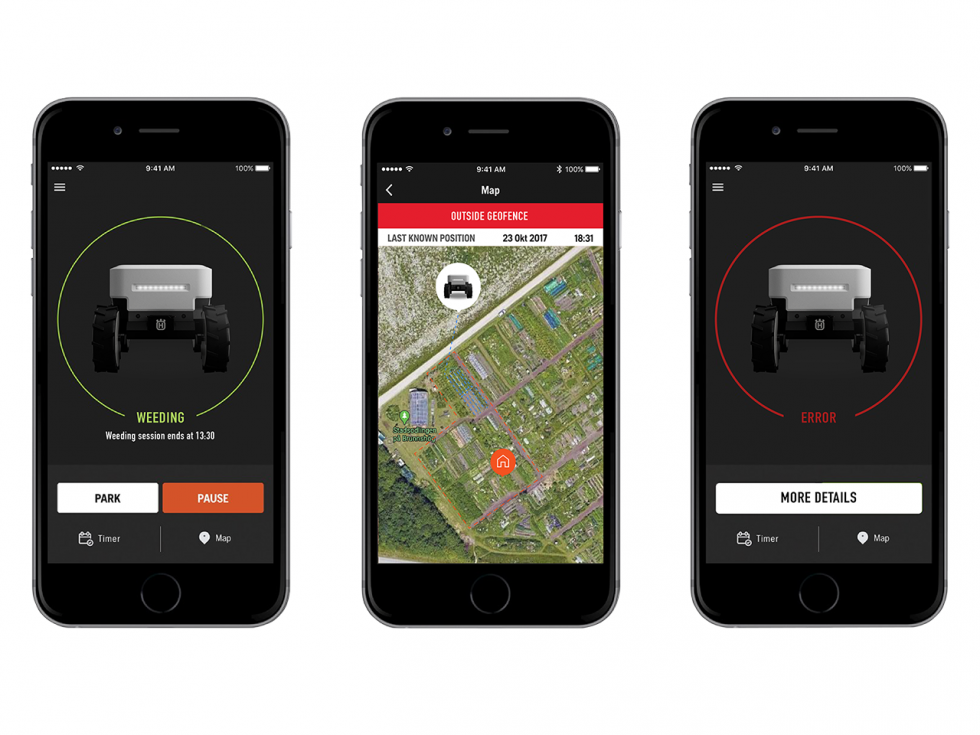
Autoweeder can easily be managed through an app, which gives the user full control of the robot. The app allows the robot to be shared between people who grow food in a shared space.